Börja skapa ett inredningsförslag till din drömlägenhet i Brf Oceanpiren. Vem är målgruppen för ditt design- och inredningförslag? Tänk funktion och form. Har du något speciellt tema du vill utgå ifrån? Ska det vara en enhetlig design i alla rum eller vill du ha olika uttryck i olika rum?
Sök efter inspiration utefter dina tankar och idéer. Spara ner inspirationsbilder och länkar till de sidor du hittar.
Välj ut möbler och andra inredningsdetaljer från IKEA.se. Spara ner dina inspirationsförslag i din design-loggbok eller direkt i ett nytt dokument som du döper till “TIS-projekt Oceanpiren Förnamn Efternamn”.
Tillverkningstekniska (gjutbarhet, svetsbarhet, varm- och
kallbearbetbarhet)
Materialstandarder
Svensk standard SS
Europastandard EN
Vid val av
konstruktionsmaterial måste vi ta hänsyn till materialegenskaper, pris,
tillgänglighet och miljöfaktorer.
Individuellt research arbete 2020-02-05:
Sök svar på frågorna för de olika konstruktionsmaterialen nedan. Skriv dina svar i din loggbok. Ange vilka källor har du använt för att hitta dina svar.
Natursten
Ge några exempel på natursten. Ge exempel på materialegenskaper. Ge exempel på användningsområden.
Cement
Vad är cement? Vad består det av? Ge exempel på materialegenskaper. Ge exempel på användningsområden.
Betong
Vad är betong? Vad består det av? Ge exempel på materialegenskaper. Ge exempel på användningsområden.
Lättbetong
Vad är lättbetong? Vad består det av? Ge exempel på materialegenskaper. Ge exempel på användningsområden. Nämn två fördelar med lättbetong jämfört mot vanlig betong.
Keramer
Vad är keramer? Vad består det av? Ge exempel på materialegenskaper. Ge exempel på användningsområden.
Tegel
Vad är tegel? Vad består det av? Ge exempel på materialegenskaper. Ge exempel på användningsområden.
Glas
Vad är glas? Sodaglas, Kristallglas, Borsilikatglas, specialglas. Vad består det av? Ge exempel på materialegenskaper. Ge exempel på användningsområden. Vad händer när ett härdglas brister?
KL-trä?
Beskriv vad det är. Vilka egenskaper kännetecknar KL-trä? Ge exempel på användningsområden för KL-trä. Vilka fördelar har KL-trä?
Limträbalk
Beskriv vad det är. Vilka egenskaper kännetecknar en limträbalk? Ge exempel på användningsområden. Vilka fördelar har Limträbalken?
Vad ska vi lära oss inom detta? (i kursen Konstruktion 1)
Några vanliga konstruktionsmaterial och konstruktionselement för byggnation
Element i den bärande stommen och några olika konstruktionsexempel
Faktorer att beakta vid val av bärande stomsystem
Tre metoder att dimensionera en bärande konstruktion.
Några beräkningar av laster
Stomsystemets uppbyggnad vid byggnation
Den bärande konstruktionen kan ofta delas in i en primär- och en sekundärstomme. Stomsystemet i en byggnad har till uppgift att göra byggnaden stabil och hållbar för alla yttre belastningar som t ex vind och snölaster. Givetvis behöver man även ta hänsyn till de ingående materialens egenvikt vid dimensionering av stommen.
Den primära konstruktionsstommen är den som primärt för ned lasterna till grunden.
Den sekundära konstruktionsstommen utgörs av konstruktionselement vars uppgift är att föra över lasterna till primärkonstruktionen.
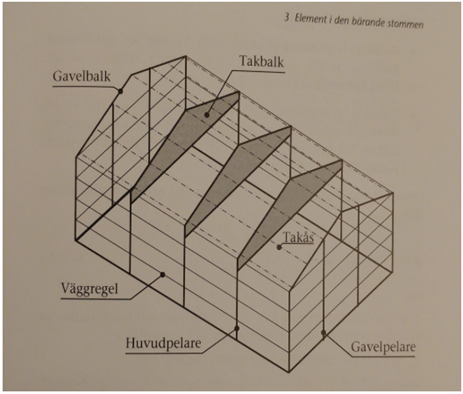
Figuren visar stomsystemet för en hallbyggnad.
Primärstommen utgörs av takbalkar, gavelbalkar, huvudpelare och gavelpelare. Till primärstommen räknas också eventuella vindförband i väggar och tak samt takplåten om denna används som stabiliserande skiva.
Till sekundärstommen räknas takplåt, takåsar, väggplåt och väggreglar, vilka även kan kallas sekundärkonstruktioner.
Vanliga konstruktionsmaterial och konstruktionselement för byggnation
I Sverige är det vanligaste materialet i byggnaders stommar olika typer av trä. För småhus utgör oftast både primär- och sekundärstommen träkonstruktioner eller en kombination av trä och stål. I större fastigheter med flera våningar, som flerbostadsfastigheter eller kontorsfastigheter, så utgörs den bärande primärstommen oftast istället av stålbalkar eller betong för att klara av att bära de betydligt större lasterna som en stor och hög byggnad belastas med. Intresset för att även bygga primärstommen i flervåningshus av trä har dock på senare år ökat pga miljö- och klimatskäl, vilket vi kommer studera ett antal exempel på.
De icke bärande innerväggarna som delar in de olika rummen i lägenheterna och lokalerna brukar vara konstruerade av träreglar eller stålreglar och gipsskivor.
Konstruktionsexempel för väggar av trä
Yttervägg – generella lösningar
Ytterväggen ingår vanligen i byggnadens stomme. Den byggs oftast upp med regelverk såväl när det gäller bärande som icke bärande ytterväggar. Även korslimmat trä, KL-trä förekommer som stommaterial, särskilt i flervånings trähus.
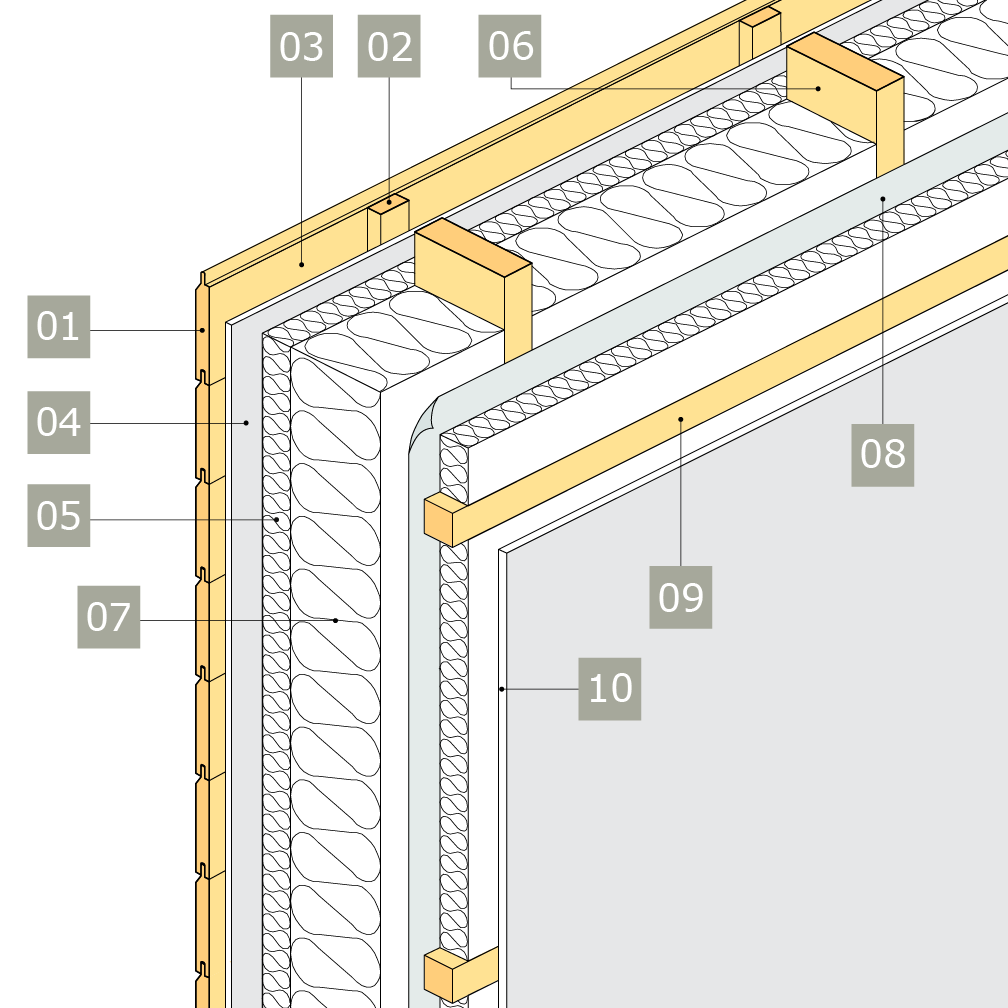
Yttervägg med liggande panel
3D-ritning av yttervägg med liggande panel
Ingående material
Liggande panel.
Spikläkt.
Luftspalt/kapillärbrytande spalt.
Vindskydd.
Yttre isolerskikt fäst med distanshylsor.
Vertikal väggregel.
Värmeisolering.
Ångspärr.
Horisontell väggregel, så kallat installationsskikt.
Invändig väggbeklädnad.
Material
Spikläkt: läkt 34×45 mm, sort G4-3 eller bättre.. Vertikal och horisontell väggregel: konstruktionsvirke 45 mm. Vindskydd: skivmaterial, utvändigt godkänd och fukttålig skiva. Värmeisolering: skivor av mineralull. Ångspärr: åldringsbeständig plastfolie. Invändig beklädnad: beklädnadsskivor eller träpanel.
Liggande profilerad panel av trä utomhus: tjocklek ≥ 22 mm, bredd <113 mm (täckande bredd). Fästdon: varmförzinkad trådspik 75-2,8 för bräder < 32 mm, varmfözinkad trådspik 100-3,4 för bräder ≥ 32 mm.
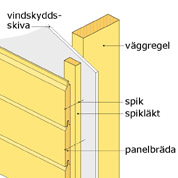
Bild 1. Liggande panel skarvas genom att panelbräder kapas vinkelrätt och monteras dikt an mot varandra. Spikhålen förborras och bräderna skråspikas, alternativt används självborrande panelskruv. Skarvar bör fördelas jämnt över fasadytan.
Lättbalkar och lättreglar
Lättbalkar och lättreglar är goda exempel på hur olika trämaterial kan kombineras i en produkt.
Vanligast är balkar och reglar med I-format tvärsnitt. Dessa är optimerade för böjbelastningar. I flänsarna som ska kunna ta upp tryck- respektive dragkrafter används konstruktionsvirke eller LVL (Laminated Veneer Lumber). I livet, vars främsta uppgift är att ta hand om skjuvkrafter, används olika slags skivmaterial. I Sverige används företrädesvis träfiberskiva medan OSB (Oriented Strand Board) dominerar i Nordamerika. I-balkar introducerades i Sverige i mitten av 1970-talet som ett alternativ till konstruktionsvirke. I-balkar kan fås med större balkhöjder än vad som är möjligt med massivt virke. I-balkarna har också fördelen att vara lätta och förhållandevis formstabila. I Nordamerika ersätter I-balkar massivt trä i allt större utsträckning.
För användning och dimensionering hänvisas till tillverkarens anvisningar och produktinformation. Lättreglar och lättbalkar ska vara CE-märkta.
Problemlösning kommer vi i kontakt med i många olika situationer och sammanhang, både i skolan, arbetslivet och i privatlivet. För att kunna lösa problem behöver man givetvis en hel del kunskaper kopplade till det specifika ämnesområdet. Men det finns även en del generella saker, strategier och metoder man kan använda sig av för att bli en bättre problemlösare.
Problemlösning kan delas in i följande områden: Problemlösningens faser, tänkbara strategier vid problemlösning och de kompetenser som är nödvändiga hos en problemlösare.
Elevernas arbete med ett problem kan delas upp i fyra successiva faser:
att förstå problemet
att göra upp en plan
att genomföra planen
att se tillbaka och kontrollera resultatet
En av de viktigaste faserna för lärande är den sista, att efter man tror sig kommit fram till en lösning se tillbaka, kontrollera resultatet och reflektera.
Några frågor man kan ställa sig är:
Stämmer lösningen verkligen med de förutsättningar som ges i problemet?
Finns det något annat, kanske enklare sätt att lösa problemet på?
Kan jag kontrollera mitt resultat genom att lösa problemet på ett annat sätt?
Har jag upptäckt några nya spännande samband som jag kan ha nytta av i andra sammanhang?
Strategier för en bra problemlösningsplan:
välja en eller flera laborationer att arbeta med
rita bilder
söka mönster
arbeta baklänges
göra en lista
skriva upp en ekvation
dramatisera situationen
göra en tabell eller ett diagram
gissa och pröva
lösa ett enklare problem först
använda laborativa material
Bygga och använda modeller
Bygga och använda prototyper
Använda simuleringsverktyg
Kolla hur du själv eller andra löst liknande problem tidigare
Vad säger Strålskyddsstiftelsen om strålningsriskerna med 5G?
Hur trovärdiga anser du att de tre olika källorna är som hänvisas till i detta inlägg? Gradera dem gärna 1-10 efter trovärdighet och saklighet där 1 är mycket lågt och 10 mycket högt.
Uppdatering 2020-02-04: Enormt gensvar på Södras nyhet om lösning för återvinning av textilier! När Södra i slutet av oktober presenterade sin världsunika lösning för textil återvinning – OnceMore™ lät inte reaktionerna vänta på sig. Det blev ett omedelbart genomslag och timmarna efter nyheten släppts strömmande förfrågningar in från hela världen. – Vi trodde att det skulle vara en stor nyhet men blev nog ändå lite chockade över gensvaret. Det visar vilket enormt intresse det är i återvinningsfrågan, säger Helena Claesson, projektledare Södra. https://www.bioinnovation.se/nyheter/genombrott-for-sodra-med-textilatervinning-i-industriell-skala/ Skogindustrikoncernen Södra, som även är Sveriges största skogsägarförening, har tagit fram en ny metod för att återvinna fibrer från blandmaterial för att tillverka nya textilier.
Flera miljoner ton textilier slängs varje år. Mycket på grund av det inte har funnits någon effektiv teknik för återvinning av textilier i stor skala. En utmaning kring att lyckas med en sådan process ligger i alla materialblandningar som först behöver kunna separeras från varandra.
Men nu meddelar Södra att de har nått ett genombrott i att återvinna textilier som är gjorda av blandmaterial. Med hjälp av ny teknik kan bolaget i industriell skala separera polyester från bomull, viskos eller lyocell. De uppdelade fibrerna kan sedan användas för att tillverkning av nya kläder.
– Det speciella är att vi kan ta hand om blandmaterial och inte har några begränsningar i polyesterhalten. Vi jobbar redan i industriell skala och behöver inte bygga någon ny fabrik utan kan justera befintliga anläggningar, säger Helena Claesson i en kommentar till DI, som har lett projektet på Södra.
Produktionen kommer att starta på en låg nivå om 30 ton under innevarande år. Men målsättningen på sikt är att komma upp i 25 000 ton textilier för inblandning i massatillverkningen. Enligt Södra själva är detta ett världsunikt genombrott, vilket kan göra det möjligt att mer textilier återvinns i stället för att gå till förbränning i framtiden.
Bakgrund: I slutet av 2017 presenterades en världsunik återvinningsprocess för textilier – Blend Re:wind. För första gången finns nu en metod som lyckas ta till vara på både bomullen och polyestern från tyg med polyester/bomullsfiberblandning. Processen har tagits fram inom forskningsprogrammet Mistra Future Fashion av forskare vid Chalmers och RISE tillsammans med skogsindustriföretaget Södra.
Denna revolutionerande process är resultatet av sex års forskning och är avgörande för storskalig kommersialisering och framtida produktion av återvunnet tyg.
Att återvinna textil till textil i god kvalitet och känsla är en komplex uppgift. Kläder består av olika material och fiberblandningar, och för att kunna återvinna dem krävs utveckling av nya teknologier och innovationer. Idag uppskattas den globala återvinningen av textil tillbaka till textil vara nästintill obefintlig. Majoriteten av uttjänta kläder förbränns eller läggs på deponi. Textilavfall är därför en outnyttjad resurs för modeindustrin som är i stort behov av mer hållbara materialalternativ.
Blend Re:wind-processen har tagits fram inom forskningsprogrammet Mistra Future Fashion av forskare vid Chalmers och RISE tillsammans med skogsindustriföretaget Södra. Bomull- och polyesterfibrer separeras i en kemisk process och frigörs till tre rena produkter; bomull och polyesterns två byggstenar, en i fast och en i flytande form. Bomullen återvinns sen till nya viskosfilament av hög kvalitet och polyestern kan åter byggas upp till nya starka fibrer. Detta ger cirkulära produktströmmar och innebär att vi kommer närmare lösningen att sk ”close the loop” för textil.
Huvudfokus har varit på återvinning av bomull och att producera nya högkvalitativa viskosfilament från den återvunna bomullen. Bomull är en naturlig cellulosabaserad råvara, med hög miljöbelastning. Därför är det viktigt att så mycket som möjligt återanvända och återvinna denna unika fiber som naturen framställer. Projektet har letts av Dr Hanna de la Motte som förklarar:
– De olika fibrerna i tyget måste separeras innan de återvinns. Polyestern som är en syntetisk fiber är generellt enklare att hantera än de komplexa naturliga bomullsfibrerna, men tack vare nationell spetskunskap inom cellulosakemi har vi hittat en lösning som även tar till vara på bomullen. Därför är vår separationsprocess, med cirkulära lösningar för båda materialen, ett viktigt bidrag till de framtida globala systemen för textilåtervinning. Det behövs för att kunna möjliggöra cirkularitet för mode och textilier.
Ett gediget doktorandarbete av Dr Anna Palme ligger till grund för utvecklingen. Att förstå hur bomull påverkas av slitage har varit A och O i projektet och därför har hon gjort omfattande studier av slitna lakan från sjukhus innehållande bomull och polyester. Från den bomull som utvunnits ur de slitna lakanen har därefter fina viskosfilament kunnat framställas.
En stor fördel med Blend Re:wind-processen är att separationen tar hänsyn till befintliga industrier. Målet har hela tiden varit att integrera med befintlig skogs- och kemiindustri eller andra återvinningsinitiativ. Anna Palme förtydligar:
– Viskosen har samma kvalitet som filament gjorda av kommersiell dissolvingmassa från skogsindustrin och som används i viskosproduktion. Det innebär att materialet förhoppningsvis enkelt kan integreras i dessa processer. Den separerade polyestern kan polymeriseras till hög kvalitet och är lämpliga för integration i befintlig industri. Här finns redan etablerade samarbeten med industriaktörer och experiment utförs.
– Separationen använder kemikalier som redan idag nyttjas i både skogs- och viskosindustrin, vilket därför underlättar möjliga integreringar, detta för att minimera både miljömässiga och ekonomiska kostnader. Att gå från labb till uppskalning är dyrt och är därmed vår största utmaning just nu. Med möjlighet att integrera processen i befintlig industri hoppas vi kunna hantera denna utmaning bra.
Ett annat viktigt krav har varit att Blend Re:wind ska ha en bra miljöprestanda. Forskningsprogrammet Mistra Future Fashion handlar framförallt om att finna lösningar som ger en hållbar modeindustri. Separationsprocessen uppfyller dessa krav främst genom att vara vattenbaserad och består av vanliga, billiga bulkkemikalier och en katalysator.
Framtiden för textilåtervinning ser mer ljus ut än någonsin. Det genomförs forskning och global utveckling som aldrig förr. Hanna de la Motte berättar:
– Det tog sex år att komma till denna punkt då vi ser lovande resultat i vår process för framtida textilåtervinning. Men vi är inte ensamma, det finns många briljanta återvinningsinnovationer och framtiden behöver mer forskning inom området. Gällande Blend Re:wind är vår bedömning är att den har stor potential på den globala marknaden i framtiden.
Kontakta för mer information:
Dr Hanna de la Motte, temaledare Mistra Future Fashion och forskare vid RISE Research Institutes of Sweden, hanna.delamotte@ri.se
Mistra Future Fashion är ett forskningsprogram om hållbart mode, och undersöker hur dagens modeindustri och konsumtion kan bli hållbar. Vägledda av principerna för cirkulär ekonomi, arbetar programmet tvärvetenskapligt och involverar 50+ partners från hela ekosystemet för mode. Med ett unikt systemperspektiv kombineras nya metoder för design, produktion, användning och återvinning med relevanta aspekter som nya affärsmodeller, politik, konsumentbeteende, livscykelanalys, systemanalys, kemi, teknik mm. Forskningsstiftelsen MISTRA är initiativtagare och primär finansiär för åren 2011-2019. Läs mer på www.mistrafuturefashion.com
FAKTA om Blend Re:wind processens innehåll:
Högkvalitativa återvunna filament: Huvudfokus har varit på återvinning av bomull och att producera nya högkvalitativa viskosfilament från den återvunna bomullsströmmen, vilket är avgörande för vidare industriell bearbetning mot återvunnet tyg.
Framgångsrik fullständig återvinning av polycottonblandningar med rena produktflöden och med högt materialutbyte: Viskosfilament har framgångsrikt
erhållits från den bomull som utvunnits från slitna polycottonlakan. Filamenten har samma kvalitet som filament gjorda av kommersiell dissolvingmassa som används i kommersiell viskosproduktion. Den separerade resten från polyester, polyestermonomerer, kan polymeriseras till polyester av hög kvalitet. Dessa monomerer är lämpliga för integration med befintliga kemikalieprocesser – här är samarbete med industriaktörer redan etablerat och experiment utförs.
God genomförbarhet med befintliga industriprocesser: En stark fördel med Blend Re:wind processen är att separationen tar hänsyn till befintliga industrier, och målet är integration med befintlig skogs- och kemisk industri eller återvinningsinitiativ. Separationen använder kemikalier som redan används i den svenska skogsindustrin och i viskosindustrin för att underlätta möjliga integreringar.
Stark miljöprestanda: Det är en lämplig separationsprocess eftersom den är vattenbaserad och använder endast vanliga, billiga bulkkemikalier och en katalysator.
Om forskningen och Blend Re:wind processen:
Blend Re:wind initierades 2011 och har utvecklats inom det svenska Mistra Future Fashion av parterna Chalmers Tekniska Högskola, RISE Research Institutes of Sweden och Södra.
Arbetet har letts av Dr Hanna de la Motte, temaledare för tema 4, Återvinning, inom Mistra Future Fashion och forskare vid RISE. Hennes kompetens ligger inom cellulosakemi och kemisk återvinning av textil där hon är en internationellt erkänd expert. Andra nyckelpersoner involverade är Dr Anna Palme, forskare och ansvarig för den tekniska utvecklingen på Chalmers och Dr Harald Brelid vetenskaplig rådgivare från Södra.
Projektets budget är 6 miljoner kr och har finansierats inom Mistra Future Fashion med medel från forskningsstiftelsen MISTRA, kompetensplattformen Cirkulär Ekonomi på RISE, samt in-kind bidrag från involverade partners.
Projektet har bidragit med ny grundläggande kunskap inom kemisk textilåtervinning och med flertalet vetenskapliga publikationer:
Avhandlingar
Recycling of cotton textiles: Characterization, pretreatment, and purification
Resultaten har också belönats med flertalet utnämningar:
Renova miljöstipendium 2017
Delas ut årligen och syftar till att stimulera forskning inom miljö- och återvinningsområdet.
Till Anna Palme – Annas forskning handlar om att återvinna textilier av blandmaterialet polyester/bomull, ett material som bland annat används i lakan för sjukhus. Blandtextilier av polyester och bomull ska inte slängas utan återvinnas till nya textilier! Det är målet för Anna Palmes forskning.
Drönarfoto över Oceanhamnen och Pixlapiren 22 januari 2020
Det händer mycket i Oceanhamnen i Helsingborg nu. Oceanhamnen är första etappen av stadsutvecklings-projektet H+ i Helsingborg som fram till år 2035 ska omvandla en miljon kvadratmeter gammalt hamn- och industriområde till de fyra stadsdelarna Oceanhamnen, Universitetsområdet, Husarområdet och Gåsebäck och ge plats för 10 000 nya invånare. Syftet är att skapa framtidens smarta hållbara stad och då behöver vi självklart involvera eleverna på Innovationsgymnasiet i Helsingborg!
Alla viktiga projekt behöver en flygande start! Först ut på bollen är teknikeleverna i årskurs 2 (TE18DP) som läser Design, Konstruktion, CAD och produktutveckling som, förutom att skapa 3D-ritningar med inredningsförslag till blivande bostadsrätter, kontor och hotell, även kommer bygga fysiska 3D-modeller av de nya bostäderna. Teknikeleverna i årskurs 1 (TE19) är också med i projektet och kommer jobba med fasadritningar och bygga skalenliga modeller av fastigheternas fasader inom kursen Teknik 1. TE18DP ska även designa och konstruera förslag på smarta, kompakta och mobila modulära studentbostäder av återbruksmaterial. Som en naturlig del i projektet väver vi in innovativa tekniska lösningar för smarta hem, intelligenta byggnader med lokal energiåtervinning och system för användarcentrerad feedback i syfte att minska varje individs energi- och vattenförbrukning och avfallsmängd. För de projekt och produktidéer som rör IoT (Internet Of Things) och digitala lösningar kommer våra elever (TE18IM) som läser Dator- och Nätverksteknik, Programmering, Webbutveckling och certifieringskursen Cisco IoT Fundamentals Connecting Things involveras. Genomgående för uppdragen är tillämpning av principer för hållbar design och användandet av moderna professionella digitala design- och konstruktionsverktyg som Blender, Sketchup, Fusion 360, Meshroom, Autodesk Revit, Unity, Unity Reflect samt 3D-skrivare och återbruksmaterial för att skapa skalenliga fysiska modeller. Under våren kommer natureleverna (NA19), som en del av projektet ”TIS-Tema Vatten”, titta närmare på den nya innovativa vattenreningsanläggningen Reco Lab (se mer info nedan) som är en modell för framtidens avloppssystem som håller på att byggas i Oceanhamnen.
Oceanhamnsområdet är just nu en inhägnad byggarbetsplats där förvandlingen till en levande stadsdel med de första 450 bostäder pågår för fullt så att de första invånarna kan flytta in redan nästa år. Här byggs också restauranger, handelsyta och Oceanhamnen Waterfront Business District, ett nytt affärsdistrikt med 32 000 kvadratmeter nya kontor. Området får endast besökas av behörig personal med ID06 passerkort, så vi har inte möjlighet att gå dit och göra fältstudier på nära håll med eleverna. Så för att få en inblick i hur arbetsprocesserna och bygget fortskrider får vi ta till andra kreativa metoder. I första hand söker vi samarbeten med de aktörer som är inblandade i olika delar av Oceanhamnen-projektet.
För att få lite perspektiv på projektet, fågelperspektiv alltså, så lyfte jag blicken och flög runt ett par varv och kollade in hur området ser ut idag, den 22 januari 2020. Här nedan är ett litet filmklipp med en helikoptervy över området som vi kommer ha under luppen de närmaste månaderna.
För att få en känsla för hur det är tänkt att se ut när Oceanhamnen är färdigbyggd så är en 3D-visualisering med realistisk rendering ett bra och kraftfullt verktyg. Här nedan får du en förhandstitt i 3D på den nya stadsdelen som håller på att växa fram med ett spektakulärt läge vid havet, ett stenkast från Helsingborgs centralstation. För att skapa en sådan film kan man t ex använda programvaran Blender 2.81 som vi börjat använda i kurserna Design, Konstruktion och Cad.
Välkommen till Oceanhamnen – 3D visualisering (3:05)
Digitalisering möjliggör nya innovativa arbetssätt Om man vill gå ett steg längre och erbjuda en interaktiv upplevelse så att besökaren själv kan navigera runt i 3D-miljön så kan man istället lägga in de 3D-objekt man skapat i t ex Fusion 360 eller Sketchup, i spelutvecklingsmiljön Unity, som vi använt i undervisningen i Programmering. I Unity kan man även skapa en interaktiv VR- eller AR-upplevelse. Med Unity Reflect kan man sedan koppla samman konstruktionsritningarna och projektplaneringsverktygen och följa hela byggprocessens alla olika steg i VR från en annan plats, eller med hjälp av AR-teknik se hur byggnaden steg för steg kommer att byggas upp precis där du står, trots att det ännu inte är klart. Det är som att i realtid kunna se in i framtiden, in genom väggar eller tillbaka till hur någonting såg ut innan.
Unity Reflect gör konstruktionsdokument och ritningar digitalt tillgängliga på byggarbetsplatsen i realtid via AR.
Här kan du se var byggherrarna bygger
Det är totalt sex byggherrar som ska bygga bostäder i den nya stadsdelen. Vi vill gärna samarbeta med dem på olika sätt inom ramen för de kurser eleverna läser, men även för SYV (Studie- och Yrkes-Vägledning). Det kan t ex handla om studiebesök, intervjuer, designuppdrag eller praktikplatser. Kartan härunder visar var de ska bygga, och länkarna går till mer information om dem och deras projekt.
Översiktskarta över Oceanhamnen med markeringar för placeringen av de olika byggherrarnas bostadsfastigheter.
Oceanpiren är en del av Oceanhamnen, ett nytt spännande bostadsområde mitt i Helsingborg. På bästa läge, längst ut på piren, bygger vi 69 bostadsrätter om 1-4 RoK – Brf Oceanpiren. Här bor du på första parkett vid havet, i hjärtat av stadsdelen, i ljusa, välplanerade bostadsrätter som är byggda för en hållbar livsstil. Samtidigt om vi uppför Brf Oceanpiren bygger vi fyra radhus i townhouse-stil. Vi kallar dem Oceanvillorna. De har både hållbarhetstänket och den magnifika havsutsikten gemensamt med Brf Oceanpiren.
Design-, konstruktions- och CAD-uppgifter till TE18DP Här är en lista på exempel på arbeten och uppdrag som eleverna ska jobba med. Mer utförliga och detaljerande instruktioner ges under lektionerna, men de olika uppgifterna publiceras också på sidorna Designuppgifter för TE18DP och Konstruktions- och CAD-uppgifter för TE18DP.
Skapa en CAD-ritning på en av lägenheterna i Brf Oceanpiren. Utgå från planritningen.
Skapa ett komplett inredningsförslag till lägenheten.
Skapa konstruktionsritningar av väggsektioner, tak och golv i minst två olika material.
Skapa en materiallista och kostnadskalkyl för de ingående konstruktionselementen.
Gör hållfasthetsberäkningar och riskanalyser
Jämför materialalternativen med hänsyn till kostnad, hållfasthet, hållbarhet, miljöpåverkan, klimatavtryck och möjlighet till återvinning (livscykelanalys).
Oceanvillorna
De townhouse-inspirerade Oceanvillorna är Oceanpirens mest fulländade boende med spektakulära solnedgångar och en magnifik havsutsikt
World Trade Center Helsingborg i Oceanhamnen ska bli mötesplatsen för entreprenörer, scale-ups, etablerade företag och affärs- och helgresenärer.
World Trade Center med Scandic Hotel Helsingborg på Bröderna Pihls gränd
WTC Helsingborg blir en kontors- och hotellfastighet som kommer bli ett landmärke i Helsingborg. Med sina fjorton våningar precis vid hamninloppet ger den dig närkontakt med sundet, båtarna och kontinenten. Här kommer finnas gemensam service som reception och konferensavdelning. Gym, relax, dusch- och omklädningsrum. Restaurangen med uteservering vid vattnet och takterasser är ytterligare fördelar som berikar både arbets- och privatliv. I källaren planeras för cykelgarage med möjligheter till reparationer och en laddstation för elcyklar.
Fastighet är ritad av Juul Frost Arkitekter, men byggherren Midroc välkomnar kunderna tidigt in i processen för att kunna påverka lokalens utformning så att den passar verksamheten bäst. Att vara med och arbeta med förslag på lokalernas utformning kan vara ett bra elevprojekt! Juul Frost Arkitekter är förövrigt experter på design av campusområden och studentbostäder, och hur man kan integrera dem i städer.
Oceanhamnen får ett innovativt nytt avloppssystem– Reco Lab med Tre Rör Ut
Innovativt avloppssystem i Oceanhamnen kräver nytänk (2:13)
Oceanhamnen kommer få en helt ny typ av klimatsmart avloppssystem med värmeåtervinning och lokalt producerad biogas. Varje fastighet ansluts till tre separata rör, ett för matavfall, ett för gråvatten och ett för svartvatten. Detta innovativa avloppssystem kräver att ingenjörerna tänker utanför boxen. I filmklippet ovan berättar VA-ingenjören Peter Winblad på Nordvästra Skånes vatten och avlopp, NSVA, om utmaningarna.
Reco Lab – en testbädd och showroom för framtidens källsorterande avloppssystem
Reco Lab kommer att bidra till att utveckla det världsunika systemet Tre Rör Ut för insamling och hantering av mat- och toalettavfall i fastigheterna på Oceanpiren i stadsdelen Oceanhamnen i centrala Helsingborg.
På uppdrag av NSVA har entreprenörföretaget NCC upphandlat det nederländska företaget Landustrie och det svenska företaget EkoBalans Fenix AB för att installera processteg i det unika Reco labs utvecklingsanläggning. Reco lab, som är en del av Öresundsverket i Helsingborg, ska behandla det källsorterade avloppet från Helsingborgs nya stadsdel, Oceanhamnen. Avloppshantering har en naturlig roll att spela i den cirkulära ekonomin då mycket av våra essentiella resurser, som vatten, näringsämnen och organiskt material passerar igenom stadens avlopp.
Det källsorterande avloppet innebär en reningsprocess med kraftigt ökad resursåtervinning. Miljövinsterna är flera:
ökad biogasproduktion
ökad näringsåtervinning
effektiv värmeåtervinning
mer energieffektiv läkemedelsrening
minskad klimatpåverkan
möjligheten för vattenåtervinning
Reco Lab planeras att vara färdigbyggt och driftsatt våren 2021 och inkluderar även ett showroom för utbildning samt en testbädd för teknikutveckling. Studiebesök hos NSVA för natureleverna (NA19) är planerat till maj 2020. Eleverna i NA18 borde också studera Reco Lab som en del av biologi- och kemikurserna, i synnerhet de som valt inriktningen mot natur och samhälle.
Bilder på bygget av Oceanhamnen
Bilder från fältstudie vid Oceanhamnen och Pixlapiren 2020-01-22 med drönaren DJI Spark:
DCIM/100MEDIA/DJI_0307.JPG
DCIM/100MEDIA/DJI_0309.JPG
DCIM/100MEDIA/DJI_0310.JPG
DCIM/100MEDIA/DJI_0311.JPG
DCIM/100MEDIA/DJI_0312.JPG
DCIM/100MEDIA/DJI_0314.JPG
DCIM/100MEDIA/DJI_0315.JPG
DCIM/100MEDIA/DJI_0316.JPG
DCIM/100MEDIA/DJI_0317.JPG
DCIM/100MEDIA/DJI_0319.JPG
DCIM/100MEDIA/DJI_0320.JPG
DCIM/100MEDIA/DJI_0321.JPG
DCIM/100MEDIA/DJI_0323.JPG
DCIM/100MEDIA/DJI_0325.JPG
DCIM/100MEDIA/DJI_0326.JPG
DCIM/100MEDIA/DJI_0327.JPG
DCIM/100MEDIA/DJI_0328.JPG
DCIM/100MEDIA/DJI_0329.JPG
DCIM/100MEDIA/DJI_0330.JPG
DCIM/100MEDIA/DJI_0331.JPG
DCIM/100MEDIA/DJI_0332.JPG
DCIM/100MEDIA/DJI_0334.JPG
DCIM/100MEDIA/DJI_0335.JPG
DCIM/100MEDIA/DJI_0336.JPG
DCIM/100MEDIA/DJI_0338.JPG
DCIM/100MEDIA/DJI_0339.JPG
DCIM/100MEDIA/DJI_0340.JPG
DCIM/100MEDIA/DJI_0342.JPG
DCIM/100MEDIA/DJI_0343.JPG
DCIM/100MEDIA/DJI_0344.JPG
DCIM/100MEDIA/DJI_0345.JPG
DCIM/100MEDIA/DJI_0347.JPG
DCIM/100MEDIA/DJI_0348.JPG
DCIM/100MEDIA/DJI_0349.JPG
DCIM/100MEDIA/DJI_0350.JPG
DCIM/100MEDIA/DJI_0351.JPG
DCIM/100MEDIA/DJI_0352.JPG
DCIM/100MEDIA/DJI_0354.JPG
DCIM/100MEDIA/DJI_0355.JPG
DCIM/100MEDIA/DJI_0356.JPG
DCIM/100MEDIA/DJI_0357.JPG
DCIM/100MEDIA/DJI_0358.JPG
DCIM/100MEDIA/DJI_0359.JPG
DCIM/100MEDIA/DJI_0360.JPG
DCIM/100MEDIA/DJI_0361.JPG
DCIM/100MEDIA/DJI_0362.JPG
DCIM/100MEDIA/DJI_0364.JPG
DCIM/100MEDIA/DJI_0365.JPG
DCIM/100MEDIA/DJI_0366.JPG
DCIM/100MEDIA/DJI_0367.JPG
DCIM/100MEDIA/DJI_0369.JPG
DCIM/100MEDIA/DJI_0370.JPG
DCIM/100MEDIA/DJI_0372.JPG
DCIM/100MEDIA/DJI_0373.JPG
DCIM/100MEDIA/DJI_0374.JPG
DCIM/100MEDIA/DJI_0375.JPG
DCIM/100MEDIA/DJI_0376.JPG
DCIM/100MEDIA/DJI_0377.JPG
DCIM/100MEDIA/DJI_0378.JPG
DCIM/100MEDIA/DJI_0379.JPG
DCIM/100MEDIA/DJI_0380.JPG
Foton på Oceanhamnens pågående byggnation 2020-01-22 med drönare DJI Spark
Drönarvy | Helsingborg Oceanhamnen 2019-02-24 (Helsingborg då & nu)
Utse en Scrum Master för denna veckas Sprint och dagens Sprint Planning Meeting. Alla skriver i sin loggbok vem som är Scrum Master och vilka övriga som är med i projektgruppen och närvarande idag. Product Owners, Development Team och eventuella andra intressenter (t ex Customer, Sponsor).
Skriv en Product backlogg. Sammanställ en önskelista på alla aktiviteter. Korta beskrivningar av saker som ska uppdateras, läggas till eller förändras med hemsidan. Alla skriver något. Webbutvecklarna skriver också ner saker som behöver eller kan behöva förbättras med hemsidan.
Fokus och extra prioriterat idag är sidorna för Arbetsbeskrivning.
Gå igenom era individuella aktivitetslistor och skapa en gemensam Product Backlogg för projektgruppen.
Välj ut prioriterade uppgifter på olika personer och skriv upp vem som gör vad.
Jobba med de prioriterade uppgifterna.
Utvärdera vid lektionens slut. Vad gick bra? Hann ni fördela arbetsuppgifter till alla för veckan? Vad kunde ni gjort bättre gällande Sprint Planning-mötet?
Dagens fokus och uppgifter: Jobba vidare med Fashiontech-projekten. Skapa en fungerande prototyp av din Fashiontech-produkt.
Dokumentera information om dina ingående komponenter. Detaljerade beskrivningar av egenskaper, ritningar, datablad, material, tillverkare etc.
Hur ska komponenterna monteras in i plagget? Beskriv, skissa, rita och fotografera.
Hur ska komponenterna kopplas in? Skapa kopplingsschema.
Testa, fotografera och dokumentera din process.
Testmätningar: Vilka tester behöver du göra? Gör en lista på vad du behöver testa och skriv en planering för hur det ska gå till. Elförbrukning, värmeisoleringsförmåga, värme, kyla, ljud, ljusstyrka, sensorkänslighet etc.
Skapa symall eller mall för inbyggnad/montering av komponent.
3D-printa
Materialval. Dokumentera vilka material ditt plagg har, ta reda på materialegenskaper och dokumentera dem. Vilka andra alternativa material skulle man kunna använda istället? Fördelar och nackdelar med de olika materialen.
Sammanställ en arbetsbeskrivning som ska ligga på hemsidan.
Här är en kort introduktion till Chimera, en fördjupningsteknologi som gör det möjligt för lokala och avlägsna studenter att känna att de deltar lika och interagerar i en klassmiljö. Denna teknik kommer att vara lika användbar i alla presentatörs-/deltagarsituationer med tillägg av alternativa VR-miljöer.
Skicka frågor eller förfrågningar för mer information till JimmyG@PagoniVR.com






![MP_kontor_99493_WTC Oceanhamnen_Bröderna Pihls gränd_västerbild ([3149][@[resize:5200,2930][crop:34,0,5021,2919][autoorient:][background:%23ffffff][quality:80][strip:][extension:jpg][id:7]]).jpg](https://www.wtcmalmolundhelsingborg.se/siteassets/qbank/mp_kontor_99493_wtc-oceanhamnen_broderna-pihls-grand_vasterbild-3149resize52002930crop34050212919autoorientbackground23ffffffquality80stripextensionjpgid7.jpg?width=1010&height=630&scale=both&mode=crop)